Automatización del sistema de ajuste del menisco en instrumentos volumétricos de vidrio en el CENAMEP AIP
Núñez, Marta
Centro Nacional de Metrología de Panamá AIP (CENAMEP AIP)
Ciudad de Panamá, Panamá
mnunez@cenamep.org.pa y ORCID: 0009-0009-3351-655X
Espinosa, Eyleen
Centro Nacional de Metrología de Panamá AIP
Ciudad de Panamá, Panamá
eespinosa@cenamep.org.pa y ORCID: 0000-0001-9407-1237
Espinosa, Johanna
Centro Nacional de Metrología de Panamá AIP
Ciudad de Panamá, Panamá
jespinosa@cenamep.org.pa y ORCID: 0000-0001-7131-6692
https://doi.org/10.33412/apanac.2025.58
Abstract
The Secondary Volume Laboratory at CENAMEP AIP uses the gravimetric method for the calibration of glassware volumetric instruments. In this process, the meniscus adjustment represents the main source of uncertainty. As part of an internship program, an automated system based on the use of microcontrollers and computer vision techniques was developed, with the aim of optimising the method to reduce the error margin. The system is applicable to flasks ranging from 50 mL to 500 mL. For its development, a model was trained to detect the gauge line and the lower edge of the meniscus. The results led to the creation of a program capable of operating in real time. In conclusion, this project represents a significant advance in improving the accuracy of the measurement process, reducing errors and upgrading volumetric measurements, with potential for replication in other laboratories, impacting industrial and scientific research sectors.
Keywords: Capacity, calibration, Python, neural network, computer vision.
Resumen
El Laboratorio Secundario de Volumen del CENAMEP AIP utiliza el método gravimétrico para la calibración de instrumentos volumétricos de vidrio. En este proceso, el ajuste del menisco representa la principal fuente de incertidumbre. Como parte de un programa de pasantías, se desarrolló un sistema automatizado basado en el uso de microcontroladores y técnicas de visión artificial, con el objetivo de optimizar el método para reducir el margen de error. El sistema es aplicable a matraces de 50 mL hasta 500 mL. Para su desarrollo, se entrenó un modelo para detectar la línea de aforo y el borde inferior del menisco. Los resultados implicaron la creación de un programa capaz de operar en tiempo real. En conclusión, este proyecto representa un avance significativo en la mejora de la exactitud del proceso de medición, reducción de errores y la modernización de las mediciones volumétricas, con potencial de replicación en otros laboratorios impactando en sectores industriales y de investigación científica.
Palabras claves: Aforo, calibración, Python, red neuronal, visión artificial.
1. Introducción
El método gravimétrico constituye el procedimiento de mayor exactitud en la calibración de instrumentos volumétricos de vidrio [1], ya que permite alcanzar las menores incertidumbres posibles en la medición de volúmenes. Dentro de este proceso, el error por ajuste del menisco representa la principal fuente de incertidumbre [2] con hasta un 70 % de la incertidumbre total. El menisco es la curvatura que se forma en la superficie del agua cuando entra en contacto con las paredes del instrumento.
En el Laboratorio Secundario de Volumen en Cristalería del Centro Nacional de Metrología de Panamá AIP (CENAMEP AIP), el ajuste del menisco se realiza mediante técnicas tradicionales, es decir, de manera visual con apoyo de una lupa. Este procedimiento, aunque aceptado y utilizado en la mayoría de los laboratorios de calibración; y, el sector industrial y de investigación científica del país y la región, constituye una de las principales limitaciones del método, ya que depende de la habilidad del operador y afecta tanto la repetibilidad como la eficiencia de la medición.
Con el propósito de atender esta problemática y fortalecer las capacidades metrológicas nacionales en el área de volumen, se desarrolló un sistema automatizado de visión y control de llenado y vaciado orientado a optimizar el sistema de ajuste del menisco. Este sistema integrado es aplicable específicamente a la calibración de matraces volumétricos.
2. Materiales y métodos
A. Materiales
La automatización del sistema de ajuste del menisco se desarrolló mediante la integración de hardware y software para alinear tangencialmente el borde inferior del menisco con el borde superior de la línea de aforo. Para ello se emplearon equipos electrónicos como: una microcomputadora Raspberry Pi 4, una pantalla táctil de 5” como contraste y una cámara IMX500 compatible con la Raspberry Pi.
Para el sistema de control de llenado y vaciado se implementó un controlador L298N junto a un motor reductor. En la Fig. 1 se presentan los equipos y materiales utilizados para el desarrollo de ambos sistemas. Además, las pruebas se realizaron utilizando matraces volumétricos con capacidades nominales de 50 mL, 100 mL, 250 mL y 500 mL.
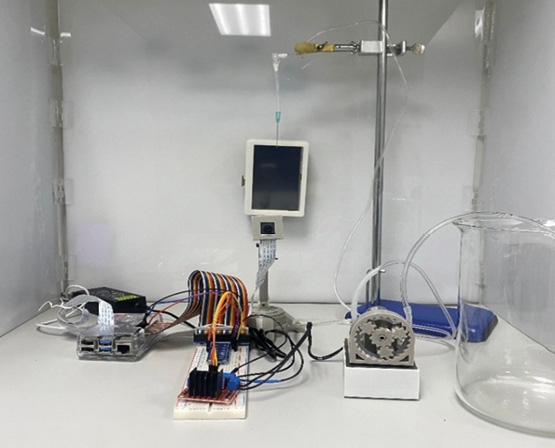
Fig. 1. Prototipo de una estación de ajuste del menisco para matraces.
B. Métodos
La automatización se ejecutó en dos etapas: desarrollo del sistema de visión y desarrollo del sistema de llenado y vaciado. Para programar el código fuente se utilizó el software Python (3.11) [3], por ser de acceso libre y ofrecer alta capacidad de procesamiento. Además, se utilizaron librerías de visión artificial como YOLOv11 para el entrenamiento del modelo [4], mientras que para el control de llenado y vaciado se realizó con la librería Rpi.GPIO. Para la ejecución del sistema de visión se realizaron los pasos descritos en la Fig. 2. Una vez programados ambos sistemas, se procedió con la integración de ambos en una interfaz gráfica utilizando la librería PySide6, de manera tal que se posibilite el funcionamiento de todo el sistema integrado.
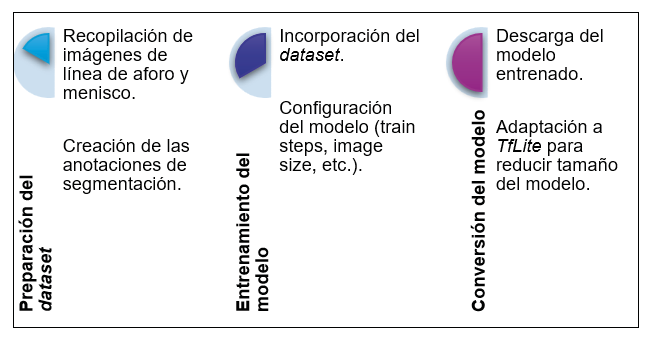
Fig. 2. Proceso de construcción del sistema de visión artificial.
3. Resultados y discusión
A. Funcionamiento del sistema integrado
A. Para el correcto funcionamiento del sistema fue fundamental realizar un entrenamiento del modelo adecuado. En la Tabla 1 se presentan algunos parámetros obtenidos durante este proceso para evaluar y validar la efectividad del modelo.
Tabla 1. Parámetros obtenidos durante el entrenamiento.
|
Parámetros |
Modelo de segmentación |
|
Librería utilizada |
YOLOv11 |
|
Tamaño del dataset (imágenes) |
482 |
|
Precisión promedio alcanzada (mAP@50) (%) |
70 |
|
Pasos |
252 |
|
Tiempo de entrenamiento (h) |
1 |
La integración de ambos sistemas permite la detección y segmentación, así como el llenado y vaciado del matraz hasta la alineación tangencial del menisco con la línea de aforo. En la Fig. 3 (a) se presentan los resultados obtenidos en tiempo real con la cámara de Raspberry Pi, donde se observa un nivel de segmentación con precisión de 44 % para la línea de aforo y de 84 % para el menisco. Estos resultados se acercan al esquema ideal del modelo, considerando las variaciones existentes debido a la toma de datos en tiempo real.
En la Fig. 3 (b) se presenta la interfaz gráfica en funcionamiento durante el ajuste del menisco en un matraz de 50 mL.
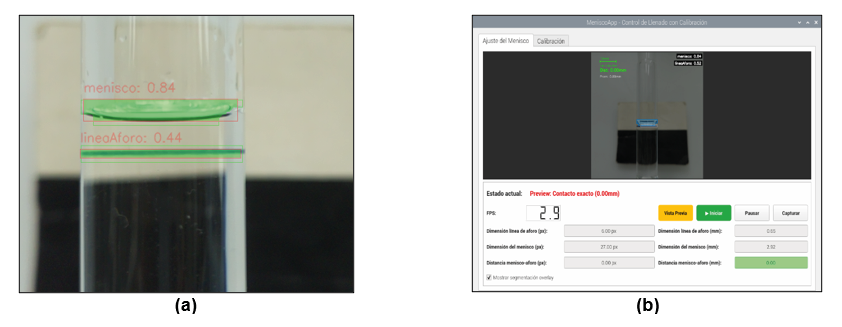
Fig. 3. Resultados obtenidos en cuanto a la segmentación del menisco y línea de aforo. (a) Segmentación del modelo en tiempo real. (b) Interfaz gráfica en funcionamiento.
En este sentido, la Tabla 2 muestra los resultados promedios de la segmentación del menisco y línea de aforo, para cada uno de los matraces ensayados los cuales fueron impresos por la interfaz.
Tabla 2. Dimensiones de la caja delimitadora de la segmentación.
|
Parámetro |
Volumen Nominal del Matraz |
|||
|
50 mL |
100 mL |
250 mL |
500 mL |
|
|
Segmentación del menisco (mm) |
2.89 |
3.18 |
2.67 |
3.65 |
|
Segmentación de línea de aforo (mm) |
0.69 |
0.63 |
0.63 |
0.71 |
B. Diseño de interfaz gráfica
Finalmente, se diseñó una interfaz gráfica para la visualización en tiempo real de los diferentes parámetros involucrados y así, permitir a los metrólogos en el CENAMEP AIP controlar el sistema de manera simplificada y sencilla. En este sentido, en la Fig. 4 se muestra la interfaz gráfica creada con botones capaces de controlar funciones de inicio, pausa, captura y salida del sistema de ajuste automatizado. A su vez, dicha interfaz permite imprimir las dimensiones de las cajas delimitadoras de la línea de aforo y bordes del menisco a través de medidas en pixeles, así como su correspondiente conversión a mm.
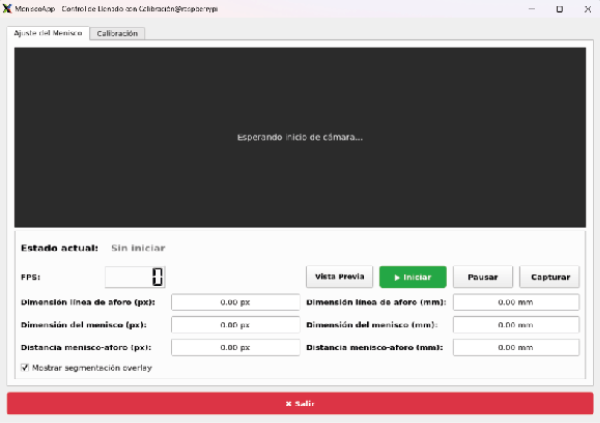
Fig. 4. Interfaz gráfica para controlar el sistema de ajuste del menisco.
4. CONCLUSIONES
El desarrollo de un sistema automatizado para el ajuste del menisco en la calibración de matraces volumétricos representa un avance significativo en las mediciones que se realizan en el CENAMEP AIP y por consiguiente en el país. Este enfoque reduce el contacto directo con el instrumento, evitando alteraciones de temperatura que afectan el volumen. También, permite optimizar los tiempos de calibración y mejorar significativamente la precisión al disminuir errores de paralaje.
Los datos que proporciona la interfaz gráfica creada, con respecto a las delimitaciones de la línea de aforo y del menisco, serán datos claves para la posterior validación del sistema y su implementación en el sistema de calidad del servicio de calibración de matraces de vidrio. Durante las pruebas realizadas, estas delimitaciones proporcionadas por el sistema automatizado son comparables con las delimitaciones medidas en el laboratorio de forma manual. Esto último muestra la funcionalidad adecuada del sistema y por consiguiente, la optimización del método de medición.
Se prevé la replicabilidad de este sistema automatizado en distintos laboratorios secundarios del país que realizan mediciones volumétricas, así como en otros Institutos Nacionales de Metrología (INM), con el fin de optimizar sus procesos. Por último, este proyecto sienta las bases para el desarrollo de un sistema de medición volumétrica totalmente automatizado que integre el registro de datos de los equipos que se utilizan para llevar a cabo la calibración.
Referencias
- ISO 4787. Laboratory glass and plastic ware - Volumetric instruments - Methods for testing of Capacity and for use. Third Edition, 2021-11.
- E. Espinosa. Volume in glass instruments: study of the normality using the Montecarlo Method. NCSL International / CPEM Workshop & Symposium, Denver, Colorado USA. 2024. https://ncsli.org/store/viewproduct.aspx?id=24414105.
- Python Software Foundation, “Python Programming Language”, Python.org. URL. https://www.python.org/.
- Ultralytics, YOLO11 Tutorial [Cuaderno de Google Colab], Reino Unido, 2025. URL. https://colab.research.google.com/github/ultralytics/blog/main/examples/tutorial.ipynb.
Agradecimientos
Se agradece a la Secretaría Nacional de Ciencia, Tecnología e Innovación (SENAYT, Panamá) por cofinanciar el “Programa de Pasantías Metrológicas - Ciclo 2025 a 2026” (Contrato de Subsidio Económico DDCCT No. 144-2024), que permitió llevar a cabo este proyecto. Asimismo, se agradece al CENAMEP AIP y a la Universidad Tecnológica de Panamá por su apoyo técnico y científico en la ejecución de este proyecto.
Autorización y Licencia CC
Los autores autorizan a APANAC XX a publicar el artículo en las actas de la conferencia en acceso abierto (open access) en diversos formatos digitales (PDF, HTML, EPUB) e integrarlos en diversas plataformas online como repositorios y bases de datos bajo la licencia CC:
Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0) https://creativecommons.org/licenses/by-nc-sa/4.0/.
Ni APANAC XX ni los editores son responsables ni del contenido ni de las implicaciones de lo expresado en este artículo.