Sistema de visualización exacta en la medición de trazos en cintas métricas
González, Elia
Centro Nacional de Metrología de Panamá (CENAMEP AIP)
Panamá, Panamá
ORCID ID: 0009-0007-6557-2818
Quezada, Katherine
Centro Nacional de Metrología de Panamá (CENAMEP AIP)
Panamá, Panamá
ORCID ID: 0009-0009-8433-7316
https://doi.org/10.33412/apanac.2025.57
Abstract
In metrology, the calibration of measuring tapes is important for accurately and precisely determining the length associated with this instrument. At CENAMEP AIP, this process was performed manually with a digital camera, where the metrologist visually identified the center of each mark. Although this method was effective, it required several hours of work and was susceptible to human variation. This project seeks to reduce calibration time and improve repeatability by automating the detection of the center of the mark. To this end, a Python program was developed that evolved from ideal image processing to real-time operation at CENAMEP AIP’s Secondary Interferometry Laboratory. The system, based on OpenCV, applies Gaussian filtering, inverse thresholding, and morphology to segment the traces, detect contours, and calculate the centers using bounding rectangles. As a result, it generates a processed image with the centers marked, allowing for faster analysis. This tool represents a step toward automating the calibration process, improving efficiency in metrology laboratories.
Keywords: Calibration, measuring tapes, laser interferometer, image processing, Python.
Resumen
En metrología, la calibración de cintas métricas es importante para determinar con exactitud y precisión la longitud asociada a este instrumento. En el CENAMEP AIP este proceso se realizaba manualmente con una cámara digital, donde el metrólogo identificaba visualmente el centro de cada trazo. Aunque este método era efectivo, requería varias horas de trabajo y era susceptible a variaciones humanas. Este proyecto busca reducir el tiempo de calibración y mejorar la repetibilidad mediante la automatización en la detección del centro del trazo. Para ello, se desarrolló un programa en Python que evolucionó desde el procesamiento de imágenes ideales hasta operar en tiempo real en el Laboratorio Secundario de Interferometría del CENAMEP AIP. El sistema, basado en OpenCV, aplica filtrado gaussiano, umbralización inversa y morfología para segmentar los trazos, detectar contornos y calcular los centros mediante rectángulos delimitadores. Como resultado, genera una imagen procesada con los centros marcados, permitiendo un análisis más rápido. Esta herramienta representa un avance hacia la automatización del proceso de calibración, mejorando la eficiencia en los laboratorios de metrología.
Palabras claves: Calibración, cintas métricas, interferómetro láser, procesamiento de imágenes, Python.
1. Introducción
La calibración de instrumentos de longitud, como las cintas métricas, es un componente esencial en los procesos de aseguramiento metrológico que respaldan la industria, la investigación y el comercio. Estos instrumentos poseen marcas o trazos distribuidos a lo largo de su superficie, cuyos centros deben ser identificados con exactitud para determinar el error de indicación en cada punto [1].
En el Centro Nacional de Metrología de Panamá (CENAMEP AIP) este procedimiento se realiza tradicionalmente mediante una cámara acoplada a un sistema de desplazamiento, el cual se mueve a lo largo de la cinta para medir distintos puntos [2, 3]. El metrólogo inspecciona visualmente cada trazo, localiza el centro y transfiere la lectura del interferómetro a una hoja de cálculo, repitiendo este proceso a lo largo de toda la cinta. Si bien este método es efectivo, presenta limitaciones inherentes al juicio visual humano y demanda largos tiempos de operación, especialmente en cintas de varios metros. Estas limitaciones motivaron el desarrollo de herramientas computacionales que permitan automatizar la detección del centro de los trazos.
En este proyecto, el objetivo fue desarrollar un programa en Python capaz de identificar automáticamente los centros de trazos de una cinta métrica utilizando una cámara CCD, basado en técnicas de procesamiento de imágenes con la biblioteca OpenCV, con el fin de establecer una metodología de medición exacta y confiable. El software evolucionó desde un entorno controlado, utilizando una imagen ideal y simétrica, hasta procesar imágenes reales capturadas por la cámara del Laboratorio Secundario de Interferometría y constituye un paso hacia la automatización del proceso tradicional, facilitando la reproducibilidad, minimizando errores y reduciendo el tiempo de las calibraciones [4].
2. Materiales y métodos
Hardware
En el Laboratorio Secundario de Interferometría se encuentran disponibles los siguientes instrumentos de medición:
- Cámara CCD de la marca FLIR: utilizada para observar los trazos a lo largo de la cinta métrica.
- Cinta métrica de alta exactitud: equipo bajo calibración utilizado durante las pruebas.
- Computadora con el programa en Python para la detección del centro del trazo.
- Interferómetro laser: patrón de referencia utilizado para realizar las mediciones.
Software
- Las librerías y programas utilizadas para la creación del programa:
- Python versión 3.11: lenguaje de programación utilizado.
- OpenCV (cv2): utilizado para el procesamiento que incluye filtrado, segmentación y detección de contornos.
- NumPy: librería para las operaciones matriciales de los filtros.
- PySide6: librería para el diseño y desarrollo de la interfaz gráfica.
- PySpin: librería para la captura en tiempo real desde la cámara.
Flujo del algoritmo desarrollado
- Captura de imagen: ocurre desde la cámara en tiempo real.
- Preprocesamiento: se convierte la imagen capturada a escala de grises, pasa por un filtro gaussiano y ocurre la binarización inversa para ver los trazos blancos sobre un fondo oscuro.
- Segmentación: se realizan las operaciones morfológicas con kernel y se detectan los contornos externos de los trazos de la cinta métrica.
- Cálculo del centro del trazo: se dibuja un rectángulo delimitador de color azul sobre los contornos de los trazos, se calcula su centro geométrico y se visualiza con una línea verde.
- Cálculo de distancia entre trazos: se miden las distancias en pixeles entre cada uno de los centros y se marcan con flechas magenta.
- Visualización: permite al usuario observar los contornos resaltados, centros marcados, flechas y distancias. Además, permite guardar una captura de la imagen resultante.
3. Resultados y discusión
El desarrollo de este programa atravesó varias etapas consecutivas, cada una diseñada para incrementar el nivel de complejidad de las imágenes a analizar. Este enfoque permitió validar de manera progresiva la robustez y eficacia del algoritmo antes de su integración con la cámara.
Etapa 1: Detección del centro del trazo en una imagen ideal
Durante la primera fase del proyecto se utilizó una imagen ideal, limpia, simétrica y sin ruido, tal como muestra en la Figura 1. El algoritmo fue desarrollado para identificar los contornos y el centro del trazo, estableciendo la estructura base del programa y ofreciendo una referencia visual para comparar con los resultados de las etapas posteriores.
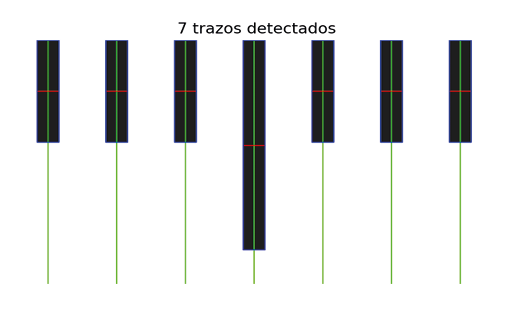
Figura 1. Imagen ideal utilizada en la primera versión del algoritmo.
Etapa 2: Imagen burda con ruido
La segunda etapa consistió en adaptar el algoritmo para analizar una imagen burda, de baja calidad y bordes irregulares. En esta fase se empleó una cinta métrica de menor exactitud, cuyos trazos carecen de simetría. Como se observa en la Figura 2, los principales retos fueron las sombras y variaciones bruscas de intensidad en diferentes puntos de la imagen. Por esta razón, fue necesario ajustar el valor del filtro gaussiano para lograr un mayor nivel de suavizado, así como modificar los parámetros morfológicos para asegurar un funcionamiento adecuado.
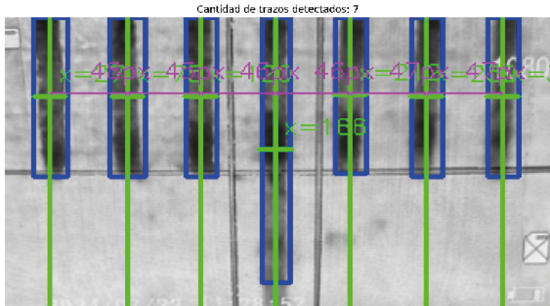
Figura 2. Imagen real con ruido utilizada para una prueba intermedia.
Etapa 3: Imagen capturada en el laboratorio
En esta etapa, se utilizó una imagen que fue capturada de la vieja cámara digital del Laboratorio Secundario de Interferometría. Esta imagen presentó ruido real, incluyendo: reflejos metálicos, iluminación irregular y trazos con desgaste real. Además, requirió cambiar el kernel morfológico, los umbrales, filtros gaussiano y bilateral para mejorar la estabilidad de los contornos. En la Figura 3, se muestra la detección del centro de los trazos en estas condiciones. A su vez, se estableció la configuración base para las siguientes fases en condiciones reales.
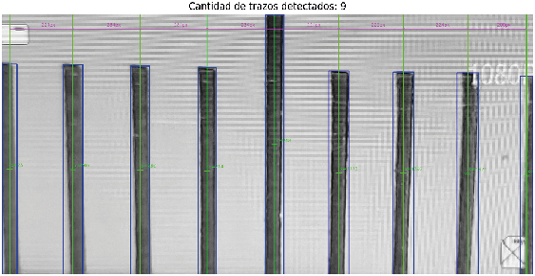
Figura 3. Imagen captada en el laboratorio.
Etapa 4: Detección en video en el laboratorio secundario de interferometría
Se adaptó el algoritmo de imágenes estáticas para que procesara un video capturado en el laboratorio. En esta etapa se introdujeron retos como: vibraciones al tomar el video, movimiento de la cinta, desenfoques temporales y fluctuaciones de brillo. En la Figura 4, se evidencia una detección parcial ante movimiento, demostrando que el sistema podría manejar un análisis en datos continuos de los trazos que detecte.
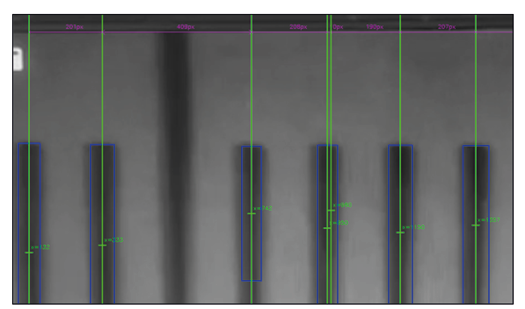
Figura 4. Fotograma del video para validar detección con movimiento
Etapa 5: Funcionamiento con cámara CCD en tiempo real
Durante la etapa final se integró el programa creado con una cámara CCD mediante la librería PySpin. En la Figura 5 se muestra el sistema implementado, capaz de procesar imágenes en tiempo real. Asimismo, se incorporaron parámetros ajustables desde la interfaz gráfica, sin necesidad de modificar el código. Esta versión final permitió detectar variaciones mínimas en la posición del centro ante el movimiento y operar de manera estable en tiempo real.
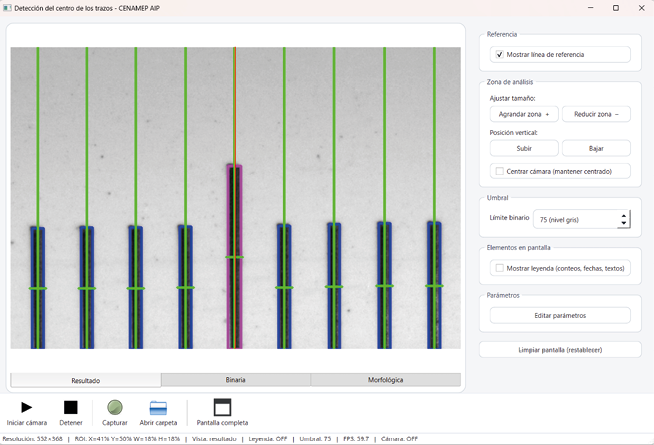
Figura 5. Programa final con la cámara en tiempo real en la interfaz gráfica.
4. CONCLUSIONES
El proyecto cumplió el objetivo de implementar un sistema en Python capaz de detectar de manera automática los centros de los trazos en cintas métricas. El sistema evolucionó desde pruebas con imágenes ideales hasta alcanzar un funcionamiento robusto en tiempo real mediante su integración con la cámara CCD. La combinación de filtros, umbralización y operaciones morfológicas permitió obtener detecciones consistentes, reduciendo la subjetividad inherente al método manual utilizado previamente por el metrólogo.
La interfaz desarrollada en PySide6 facilitó la modificación de los parámetros de procesamiento y permitió visualizar de forma clara las detecciones mediante superposiciones como contornos, centros y líneas. Además, el sistema demostró estabilidad durante su operación continua y contribuyó a disminuir el tiempo de calibración. Como futuras mejoras, se propone integrar el registro automático sincronizado con las lecturas del interferómetro láser y añadir una función de marcado en tiempo real que permita registrar puntos directamente sobre la imagen al momento de cada medición.
Referencias
- P. J. de Groot, “A review of selected topics in interferometric optical metrology”, Rep. Prog. Phys., vol. 82, n.º 5, p. 056101. Abril de 2019.
- J. García-Márquez, N. Alcalá, M. Montoya, C. Pérez, M. Gutiérrez, and J. Moya, “Calibración de un interferómetro Fizeau: cálculo de incertidumbres,” Revista Mexicana de Física, vol. 51, no. 1, pp. 114–120. Febrero de 2005.
- G. Silva Pineda and L. Ferrer Argote, “Interferometría láser y análisis de incertidumbres aplicados en vibraciones mecánicas,” in VI Congreso Anual de la Sociedad Mexicana de Ingeniería Mecánica, Colima, México, Oct. 2000
- C. Galván and H. González, “Sistema interferométrico para la calibración de reglas graduadas mediante un sistema de visión,” in Simposio de Metrología 2004, Querétaro, México. Octubre de 2004.
Agradecimientos
Este proyecto fue posible gracias al apoyo del Centro Nacional de Metrología de Panamá (CENAMEP AIP), a través de su Programa de Pasantías Metrológicas – Ciclo 2025 a 2026. Se agradece y reconoce el cofinanciamiento de la Secretaría Nacional de Ciencia, Tecnología e Innovación (SENACYT), mediante el Contrato de Subsidio Económico DDCCT N.º 144-2024 suscrito entre la SENACYT y el CENAMEP AIP. Se agradece a la Universidad Tecnológica de Panamá (UTP), por la orientación académica brindada.
Autorización y Licencia CC
Los autores autorizan a APANAC XX a publicar el artículo en las actas de la conferencia en acceso abierto (open access) en diversos formatos digitales (PDF, HTML, EPUB) e integrarlos en diversas plataformas online como repositorios y bases de datos bajo la licencia CC:
Attribution-NonCommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0) https://creativecommons.org/licenses/by-nc-sa/4.0/.
Ni APANAC XX ni los editores son responsables ni del contenido ni de las implicaciones de lo expresado en este artículo.